: Batimetría")
*Por Edgard Granados
Siempre que pensamos en la Geomática como la ciencia que estudia la tierra, literalmente nos remitimos a pensar en aquellas técnicas que nos permiten conocer la forma y ubicación de las cosas, literalmente sobre tierra firme. Sin embargo, una rama de la Geomática mucho menos popular por varios factores que vamos a ver a continuación es la Batimetría.
La Batimetría, siendo informales, es la ciencia que se encarga de la medición de la forma y composición del fondo acuático, ya sean estos grandes mares, ríos, lagos, lagunas o cualquier otro cuerpo de agua existente.
El nombre proviene del griego βαθυς, profundo, y μετρον, medida. En otras palabras, la batimetría es el estudio de las profundidades marinas, de la tercera dimensión de los fondos lacustres o marinos. Un mapa o carta batimétricos normalmente muestra el relieve del fondo o terreno como isogramas, y puede también dar información adicional de navegación en superficie.
El estudio del fondo marino ha sido una necesidad desde hace muchísimos años. La carta pisana es la carta de navegación más antigua que se conoce y data del siglo XII aproximadamente. Esta dibujada sobre piel de animal.

Ya por esos años Génova, Venecia y Mallorca producían cartas marinas conocidas como «portulanos» en sus recién inauguradas escuelas de cartografía marina
Estas cartas portulanas básicamente describen todo el mar mediterráneo y aunque no incluían sondeos de profundidad ya incluían algunos símbolos como la cruz para indicar que en ese lugar había una roca sumergida que era de peligro.
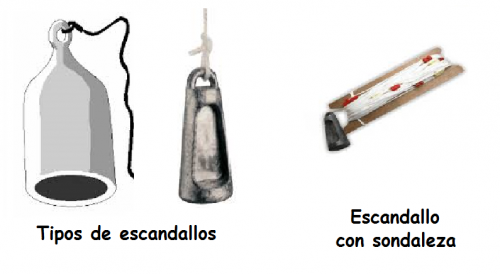
Las primeras mediciones del fondo marino se realizaron con un instrumento que se conocía como «escandallo». Este tenía una cuerda atada con unos nudos que indicaban la longitud y además un depósito en la punta que servía para recolectar muestras del suelo del fondo marino.
Hoy por hoy ocupamos técnicas más avanzadas de medición. Sin embargo, antes de contarlas en detalle hay que hablar un punto que no siempre resulta tan obvio. Realizar mediciones en medios acuáticos supone resolver varios problemas, entre muchos el más importante es que la luz se dispersa y refracta muy rápido en un medio acuático. En otras palabras, un haz de luz que proviene de la superficie rápidamente cambia de dirección y además pierde energía a muy pocos metros de profundidad con lo que no es posible enfrentar el problema de la medición del fondo marino con técnicas láser como lo haríamos en tierra porque simple y sencillamente la luz no penetra muy profundo en el agua.

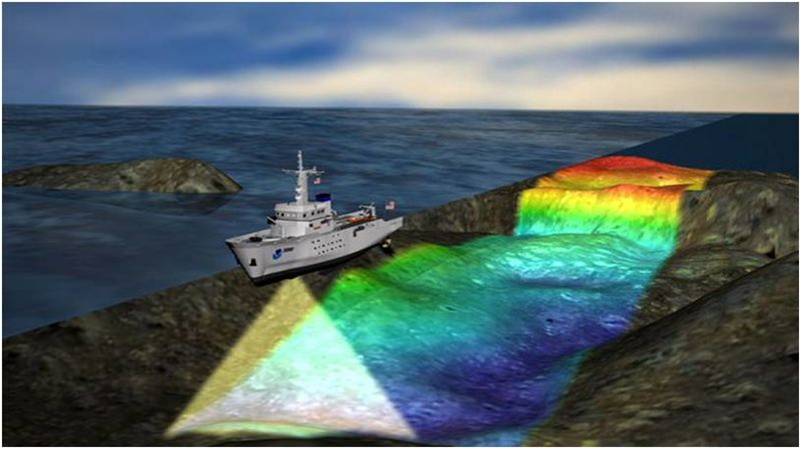
Para resolver el problema anterior se recurre al mismo principio de medición que ya hemos explicado previamente en esta entrada, que consiste en la medición del tiempo que tarda una onda en ir y volver pero en lugar de ocupar ondas de luz ocupamos ondas mecánicas, en específico ondas de sonido, es por eso que decimos que para medir ocupamos un sonar.
Sonares de medición batimétrica hay básicamente de dos tipos:
- Sonar monohaz: Son sonares que miden el fondo marino de forma discreta, es decir de manera puntual, su alcance en área y muy limitado y por eso se dice que el muestreo del fondo marino es en base a perfiles.
- Sonar multihaz: Son sonares que realizan las mediciones en términos de un barrido amplio generando mediciones del fondo marino de forma continua y casi sin ningún hueco.

Aunque no entraremos en detalle, es importante mencionar que un equipo completo de medición batimétrica deberá de incluir, aparte de su sonda de medición, los siguientes elementos:
- Sistema de posicionamiento global: Es decir receptores GNSS que determinen la posición del barco en todo momento para poder relacionar la toma del fondo marino con una determinada posición geográfica.
- Sistemas inerciales de navegación: Son sistemas compuestos por acelerómetros y giroscopios que determinan las alteraciones en el rumbo del barco para poder corregir movimientos indeseados provocados por las mareas.

Por último, quisiera hablar de un último problema que hubo que resolver y definir antes de poder estandarizar la información proveniente de un levantamiento batimétrico. El problema consiste en que por efecto de la rotación de la tierra y por influencia de la atracción gravitacional de la luna se generan lo que conocemos como mareas. Entonces, si la batimetría pretende resolver el tema de las profundidades marinas ¿Como podemos dar una profundidad si la altura del mar no es constante?

Pues aún no existe un consenso que sea ocupado por todo para definir un mismo datum a los levantamientos batimétricos, depende de cada país y como ejemplo se presentan los siguientes:
- Estados Unidos: Ocupa la media de la bajamar más baja (MLLW, Mean Lower Low Water), que se calcula a partir de la tabulación de las observaciones de mareas durante un periodo de 19 años.
- Canadá: Utiliza la bajamar más baja para grandes mareas (LLWLT, Lower Low Water Large Tide)
- Organización Hidrográfica Internacional (OHI): recomienda el uso de la marea astronómica más baja (LAT, Lowest Astronomical Tide) que es la marea más baja predicha que se espera que ocurra en un periodo de 19 años.
Pues una vez detallados los problemas básicos de la técnica de Batimetría lo que no es muy diferente a lo que hemos hablado con las técnicas de procesamiento de información LiDAR. Básicamente lo que se recolecta es una gran nube de puntos que deberá de corregirse en posición y orientación y con ellos trabajar el modelo digital del terreno que en este caso es del fondo marino.

En términos prácticos los problemas más grandes de un levantamiento batimétrico consisten en la gran cantidad de área por mapear (70% de la tierra es agua) y lo costosas que son las expediciones batimétricas en mares. Consideren que para la realización de un levantamiento batimétrico de aguas profundas no se puede ir en una balsa, ya se requiere de un barco mucho más potente con capacidad para poder aguantar varios días en altamar y eso implica, en consecuencia, una tripulación capacitada y nada despreciable en cantidad.

Hoy por hoy se realizan investigaciones para poder disminuir los costos de los levantamientos batimétricos especialmente en aguas poco profundas donde toma importancia el conocimiento del fondo marino en forma y composición especialmente para cooperativas pesqueras, organizaciones ambientales y otros sectores interesados en estas áreas pero que no pueden darse el lujo de costear expediciones batimétricas con un buque oceanográfico.
De las formas que más popularidad han ganado hay una que parece que sobresale sobre las demás principalmente por ser una técnica ya conocida para otras aplicaciones: el LiDAR.
Existen LiDAR batimétricos que son capaces de realizar mediciones del fondo acuático con la limitación de profundidades no mayores a unos 50-70 metros, por el problema de la dispersión de la luz que ya hablábamos antes.

Como la luz roja no penetra profundamente en el agua y la verde si, este tipo de lidar envía las dos bandas de luz, con la roja detecta la elevación de la superficie de agua y con la verde el fondo marino con lo que al final se obtienen dos retornos que son la profundidad de las aguas.
Existe otra segunda tecnología aunque menos popular que es la utilización de drones batimétricos. Al igual que con el LiDAR esta tecnología está limitada a pequeñas áreas como lagunas o embalses debido a su extensión y profundidad promedio, pero que a pesar de ello pueden ser útiles para los grupos y asociaciones que mencionamos previamente.

Bueno, con esto terminamos nuestra entrada por el dia de hoy, no dudes en dejar tus comentarios y preguntas y de compartir para que la información llegue a más personas.
- Levantamiento arquitectónico tradicional con apoyo de vuelo de dron para generación de planos arquitectónicos y modelado BIM en Wendys.
- Control de verticalidad Ventus
- Levantamiento Topográfico con Fotogrametría con Dron en Zurita
- Levantamiento Topográfico en la zona del Monumento a la Reconciliación e integración del Bulevar Monseñor Romero con Avenida Jerusalén
- Consultoría del desarrollo de mapas georreferenciados para la mejora de la gestión de iluminación pública, recolección de residuos sólidos y mercados en algunos municipios seleccionados.