LiDAR es el acronimo de Light Detection and Ranging o Laser Imaging Detection and Ranging.
La forma más fácil de entender la tecnología LiDAR es la siguiente: Cuando se realiza un levantamiento topográfico con estación total, el topógrafo tiene la limitación de poder medir y guardar información de un punto a la vez y únicamente a donde la mira de la estación total esté apuntando, ya sea que la estación puede medir con prisma o sin él como explicamos en nuestra entrada sobre Topografía. A parte hay que sumarle el tiempo que tarda un cadenero en ir de un lugar a otro y el tiempo que le toma a un topógrafo enfocar y ubicar el punto a medir. Es lógico pensar, entonces, que la cantidad de puntos almacenada durante un levantamiento topográfico estará en función del nivel de detalle requerido y la extensión del área de medición, pero por más nivel de detalle y área que se midan un levantamiento topográfico normal no superará más que un par de cientos de puntos y un par de miles en levantamientos de gran extensión o detalle.

Si el topógrafo fuera capaz de hacer que la estación total dispararse de forma automática muchísimas veces y en diferentes direcciones lograría tener una cantidad enorme de puntos que permitirían realizar modelados de la realidad casi idénticos debido a la cantidad de información almacenada. Pues justamente así es como funciona un LiDAR, básicamente tiene el mismo principio de funcionamiento que una estación total pero con la capacidad de almacenar varios cientos de miles de puntos en un levantamiento por pequeña que sea el área.
La verdad es que con la explicación anterior yo me tiendo a sentir de dos maneras: sorprendido del tipo «es una solución muy lógica, ¿Cómo no se me ocurrió a mí? Si quiero más detalle pues invento un equipo que pueda medir más rápido más puntos» y decepcionado a la vez, pues cuando no conocía la tecnología LiDAR pensaba que era algo super futurista y avanzado (que vaya que lo es pero no tanto como yo pensaba)
Con base en la explicación que tenemos también, alguien que conoce el funcionamiento de un Láser Escáner, podría decir que es un equipo LiDAR y estaría completamente en razón. La cuestión es que por una convención no escrita se conoce como LiDAR cuando el sistema de medición es aéreo y Láser Escáner cuando es terrestre. Por eso en esta entrada hablaremos sobre el LiDAR en su forma aerotransportada y dedicaremos una entrada al Láser Escáner más adelante.

Ahora bien no pretendo minusvalorar la tecnología LiDAR lo anterior era una introducción para entender cómo funciona, pero por supuesto que tiene sus diferencias respecto a la forma en la que mide en comparación con una estación total y no solo me refiero a su velocidad y cantidad de información almacenada.
Clasificación por forma de medir la distancia
Cuando alguien nos pregunta sobre cómo funciona una estación total, solemos decir de manera simplificada que lo que hace el aparato es enviar un rayo láser y como el láser viaja a la velocidad de la luz la estación total tiene la capacidad de medir cuando tiempo tarda el láser en ir y volver. Así, teniendo el tiempo y la velocidad del rayo podemos tener una distancia.
Lo cierto es que esto es así, pero no siempre. De hecho todos los sistemas que miden a través de rayos laser tienen dos maneras posibles, y excluyentes de medir una distancia:
- Medición por tiempo de vuelo: es la forma más tradicional de explicar cómo funciona un aparato de medición. Es justo como se explicó previamente, el aparato mide cuánto tiempo tarda en ir y volver una señal y así calcula una distancia.
- Medición por fase: es la otra forma de medición y que no es tan conocida, de hecho es hasta un poco difícil de explicar. Básicamente lo que hace el aparato es reconocer que la señal que envía esta modulada en forma de función senoidal, determina el punto en el que la señal es emitida y luego determina el punto en el que la señal retorna. Sabiendo la frecuencia de la señal y la diferencia entre el punto de salida y entrada de la gráfica puede determinar cuanta distancia hay. Para entender este sistema les coloco la siguiente imagen.

Es importante recalcar nuevamente que la clasificación anterior es, en primer lugar, aplicable a casi el 100% de sistemas de medición con láser, pero que es mutuamente excluyente, es decir, un aparato en particular es de tiempo de vuelo o de fase, pero no de los dos.
Clasificación por trayectoria de escaneado
Otra diferencia importante con el método de medición de una estación total, es la forma en la que un LiDAR realiza las mediciones. Las posibilidades son:
- Líneas: Dispone de un espejo rotatorio que va desviando el haz láser. Produce líneas paralelas en el terreno como patrón de escaneado. El inconveniente principal de este sistema es que al girar el espejo en una sola dirección no siempre tenemos mediciones.
- Zigzag: En este caso el espejo es rotatorio en dos sentidos (ida y vuelta). Produce líneas en zigzag como patrón de escaneado. Tiene la ventaja de que siempre está midiendo pero al tener que cambiar de sentido de giro la aceleración del espejo varía según su posición. Esto hace que en las zonas cercanas al límite de escaneado lateral (donde varía el sentido de rotación del espejo), la densidad de puntos escaneados sea mayor que en el nadir.
- De fibra óptica: Desde la fibra central de un cable de fibra óptica y con la ayuda de unos pequeños espejos, el haz láser es desviado a las fibras laterales montadas alrededor del eje. Este sistema produce una huella en forma de una especie de circunferencias solapadas. Al ser los espejos pequeños, la velocidad de toma de datos aumenta respecto a los otros sistemas pero el ángulo de escaneado (FOV) es menor.
- Elíptico: En este caso el haz láser es desviado por dos espejos que producen un patrón de escaneado elíptico. Como ventajas del método podemos comentar que el terreno es a veces escaneado desde diferentes perspectivas aunque el tener dos espejos incrementa la dificultad al tener dos medidores angulares.

Una tercera diferencia consiste en la capacidad de diferenciar la información proveniente de la señal. Esto es lo que se conoce comúnmente como ecos. Para entenderlo lo voy a explicar así: Cuando se realiza un levantamiento LiDAR el láser sale del vehículo aerotransportado (un dron, un avión o un helicóptero) viaja hacia tierra y regresa, pero tal es la velocidad de ida y vuelta, y el tamaño del láser (la huella del láser se va ampliando con entre mayor sea la diferencia entre lo que se mide y la altura de vuelo y por lo general anda en varios centímetros de 10-40 cms) que es posible que cuando el láser llega a tierra, una parte del choque con las hojas de un árbol y regrese, y otra parte penetre la vegetación, llegue hasta el suelo y regrese. Pues entonces los receptores LiDAR, dependiendo de su configuración están capacitados para diferenciar la diferencia de rebote entre la parte de la señal que regresó antes porque rebotó en las hojas de los árboles (1er eco) y la parte de la señal que regresó después producto de haber llegado hasta el suelo (2do eco).

La última característica propia de un LiDAR y que la hace diferente del sistema de medición con estación total es que cuando se mide con estación total, ésta guarda únicamente 5 valores del punto: ID, X, Y, Z, DESCRIPTOR. Pero un sistema LiDAR, dependiendo nuevamente de su capacidad de fábrica es posible que guarde mucha más información, adicional a la que ya se mencionó.
Una de esas informaciones adicionales es la «Intensidad» que es un valor numérico que está en función del material en el cual rebota la señal, así es como es posible realizar clasificaciones de tantos puntos obtenidos. La forma en la que se recibe la señal de retorno no solo sirve para detectar cuánto tiempo tardó en ir y volver sino que además con qué intensidad regresó, no es lo mismo un rebote de una señal proveniente de árboles, que de edificios, calles, etc. La siguiente imagen muestra puntos LiDAR que da la sensación de ser una fotografía en blanco y negro, pero en realidad cada punto solo muestra su valor de intensidad y por eso parece que es una fotografía.
El otro tipo de información capaz de almacenar por un LiDAR es el color. Es decir, valores digitales RGB que permiten visualizar todos los puntos de forma que parezca un modelo más realista. Esta capacidad no la tienen todos los equipos LiDAR y normalmente la que lo tienen son bastante más caros.
Espero que te haya resultado interesante este artículo, compártelo y comenta para que la información llegue a más personas.
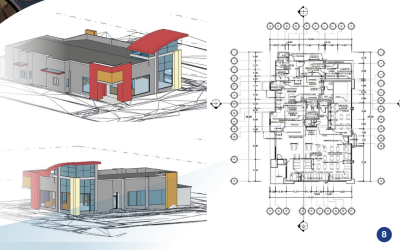
- Levantamiento arquitectónico tradicional con apoyo de vuelo de dron para generación de planos arquitectónicos y modelado BIM en Wendys.
- Control de verticalidad Ventus
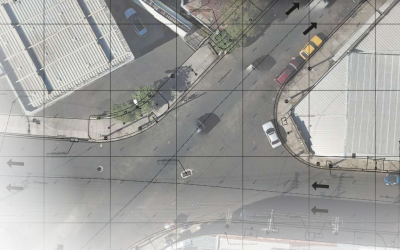
- Levantamiento Topográfico con Fotogrametría con Dron en Zurita
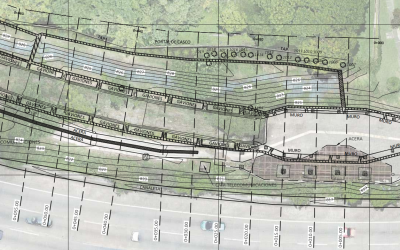
- Levantamiento Topográfico en la zona del Monumento a la Reconciliación e integración del Bulevar Monseñor Romero con Avenida Jerusalén
- Consultoría del desarrollo de mapas georreferenciados para la mejora de la gestión de iluminación pública, recolección de residuos sólidos y mercados en algunos municipios seleccionados.