¿Cuál es la diferencia entre un dron RTK (Real Time Kinematic) y un PPK (Post Processed Kinematic)? ¿Y cuál da mejores resultados?
La precisión es de vital importancia para el mapeo fotogramétrico
profesional con drones. Pero habiendo tantas opciones en el mercado, no es siempre claro cuál es la mejor para ello.
Se realizaron diferentes pruebas con drones con RTK y sin RTK, en
situaciones reales para ayudar a entender cuál es la mejor opción.
Drones RTK vs Drones sin RTK
¿Son precisos los drones sin RTK?
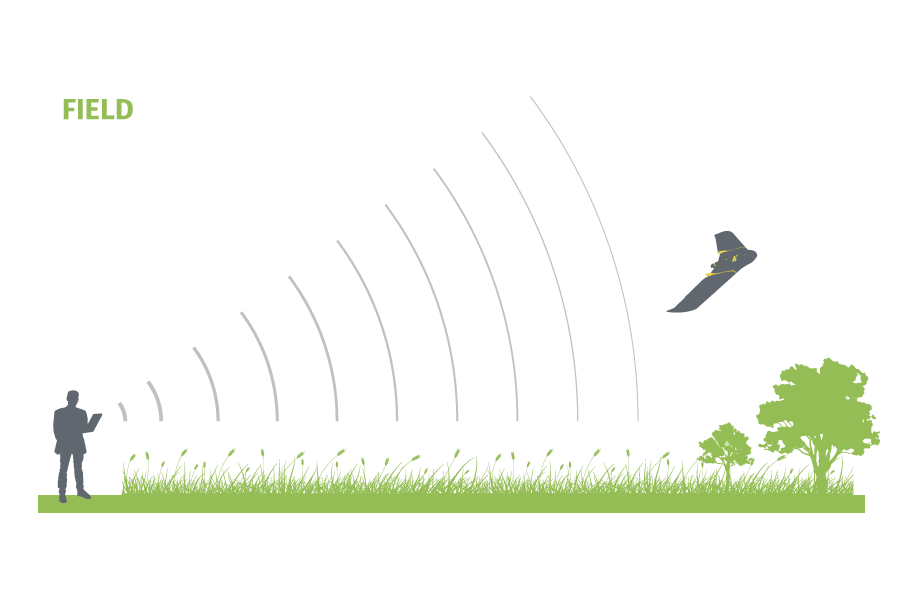
Cuando se vuela un dron sin RTK con un receptor GPS integrado o uno instalado en la cámara, las posiciones de la cámara son trianguladas desde satélites y sus posiciones son calculadas con varias medidas de distancia.
Normalmente se espera un error de varios metros, especialmente en la componente Z, dependiendo de la calidad del equipo y de la geometría de los satélites.
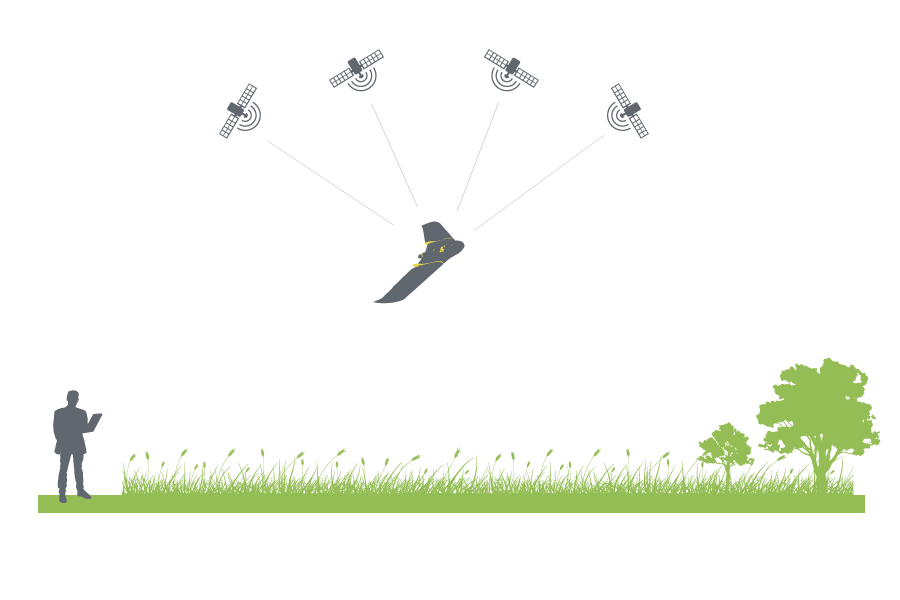
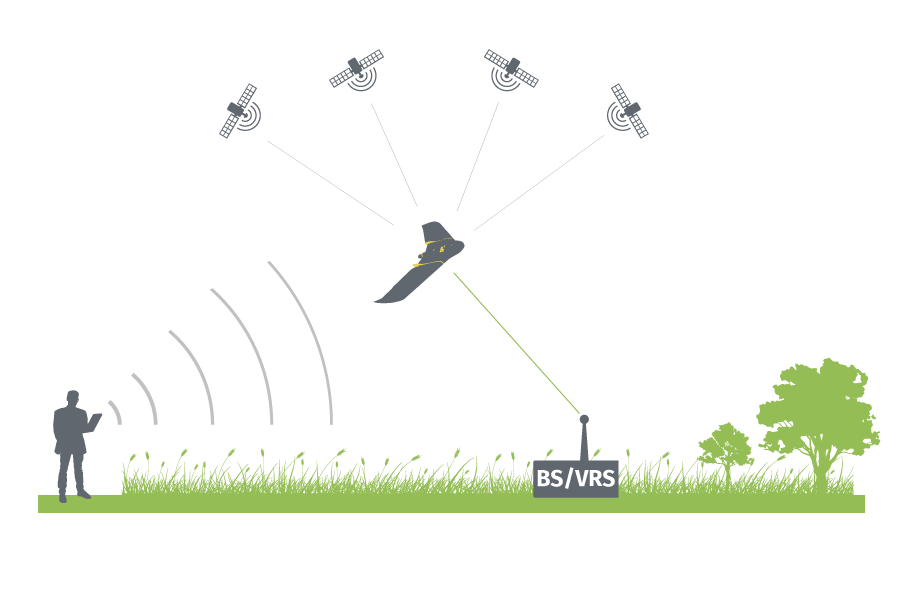
Drones RTK
Con una conexión de datos, ya sea por GSM o Wifi, un dron con RTK se conectará a una estación base física o a una estación de referencia virtual (VRS) a través de la laptop que controla el vuelo. Las posiciones de la cámara son calculadas en tiempo real, con referencia a posiciones en tierra que han sido medidas de manera muy precisa por un largo periodo de observación de tiempo. El cálculo ayuda a corregir la posición de la cámara hasta dentro de un rango de 2 a 3 centímetros de posición, tanto en horizontal como en vertical.
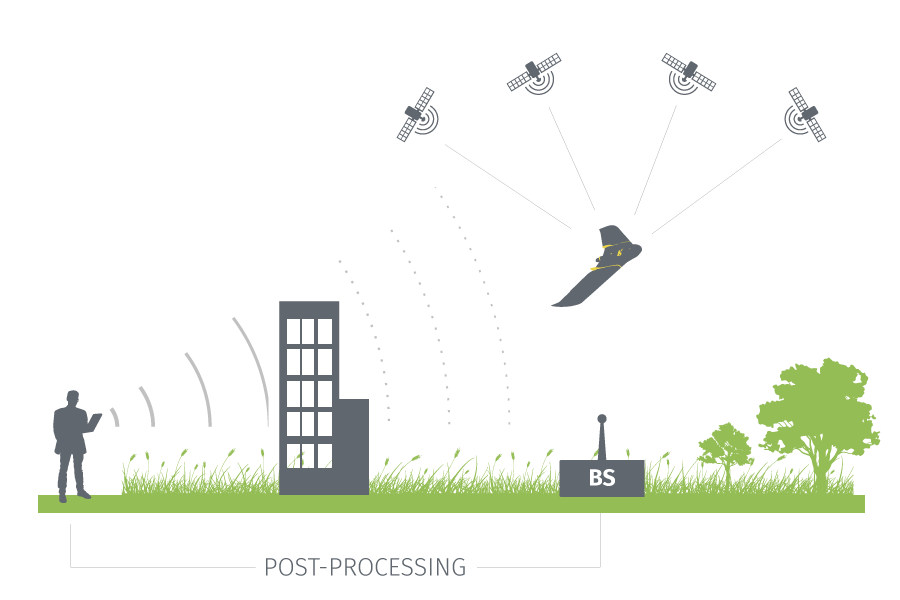
Sin embargo, las cosas no siempre funcionan perfectamente. La gente en campo puede encontrarse con interrupción en las conexiones las cuales interfieren en las correcciones en tiempo real de las posiciones de la cámara. El sistema da una solución flotante o simplemente resuelve como si no tuviera sistema RTK. Las posiciones de la cámara son RTK flotantes, lo que significa que hay gran incerteza alrededor de las correcciones. La precisión será, de unos 10 centímetros para RTK flotantes, o de varios metros tal como se da para vuelos sin RTK. En este caso, se debe desarrollar un cálculo al sistema tierra con un post procesamiento del vuelo.
Acerca de los puntos de control
¿Cual da mejor precision? ¿RTK, PPK o GCP?
Hay una ventaja de usar drones RTK sobre los que no lo
tienen si se no se planea usar puntos de control terrestres (GCPs) debido a las
limitaciones o complicaciones del procedimiento de medición en campo.
Sin embargo, un dron RTK necesita trabajar en conjunto con
un software y hardware especifico. Todo el sistema necesita apoyo de
comunicación con estaciones base, o VRS en su defecto, e incluir procedimientos
de postproceso. Es además crucial tener un software de procesamiento de
imágenes compatible, el cual tome en cuenta las diferentes precisiones de cada
posición individual de la cámara.
Todas estas implementaciones de alta tecnología hacen de los
drones RTK mas caros que los demás. Aquí se presenta una comparación entre
vuelos con sistemas RTK sin ningún punto de control terrestre (GCPs) utilizado
y vuelos sin sistemas RTK con GCPs uniformemente distribuidos. Sirva este
articulo como una referencia para aquellos que están considerando ya sea
comprar un nuevo dron o seguir trabajando con GCPs.
Para mejor investigación, se hizo dos vuelos separados: uno
con RTK y otro sin RTK sobre dos tipos diferentes de regiones: sembradíos y
áreas urbanas.

Los vuelos fueron realizados con un senseFly eBee Plus con GCPs
medidos con Javad
Triumph-Is. Tanto el vuelo RTK como el vuelo sin RTK para la misma región
tuvieron las mismas configuraciones. Se usaron GCPs para ajustar las posiciones
de la cámara de los vuelos sin RTK, y el mismo juego para puntos de chequeo y
así determinar la precisión de los dos modos.
Todos los procedimientos fotogramétricos se realizaron con
Pix4Dmapper, usando la plantilla predeterminada de 3D Map.
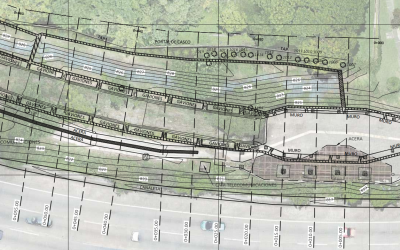
Primera prueba: vuelo en sembradios
Configuracion: Simple grid, altura= 102 m (GSD 2.5 cms), traslape 80%.
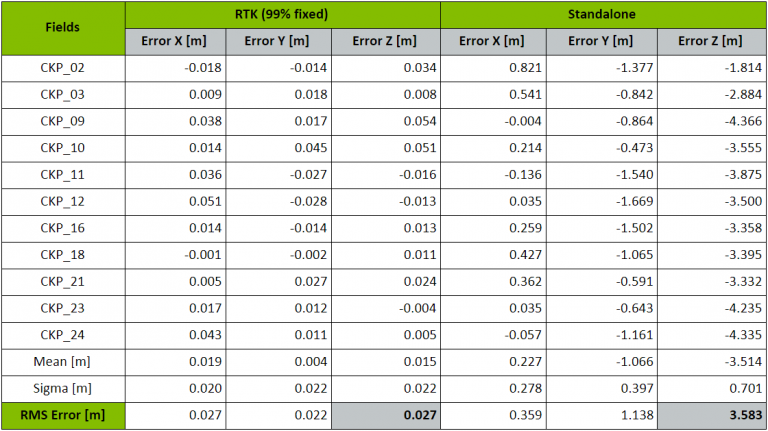
Mientras se realiza un vuelo sobre sembradíos, se espera que las conexiones no tengan ninguna obstrucción. El sistema RTK tiene el 99% de las posiciones de la cámara fijas y determinadas, no es necesario ningún post procesamiento.
Aquí se comparan las precisiones para el vuelo con RTK sin
GCPs y el vuelo sin RTK con GCPs uniformemente distribuidos. Los resultados
para el vuelo con RTK en sembradíos son bastante impresionantes.
Se obtienen precisiones de alrededor de un pixel (2.5 cms)
en todas las direcciones. Y sin RTK se obtienen 3.6 metros de precisión en
vertical, lo cual era de esperarse pues aún no se han aplicado las correcciones
de posición utilizando los GCPs.
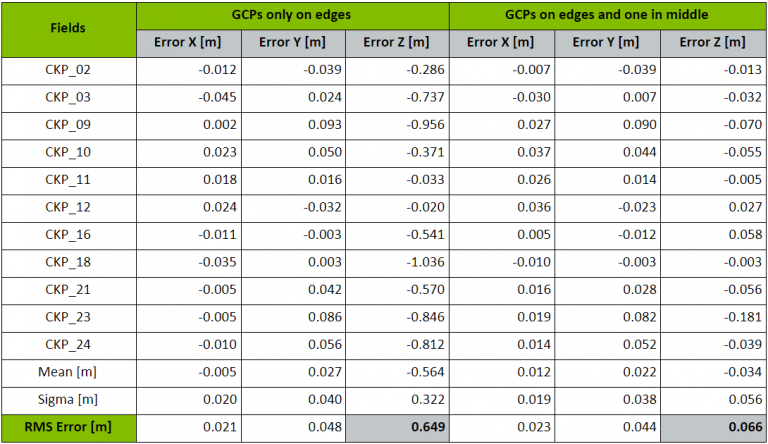
Una vez aplicadas las posiciones de los GCPs, el error en Z disminuye enormemente. Sin embargo, se encontró que la distribución juega un papel importante en este tipo de proyecto. Aquí se muestra la comparativa de resultados cuando se utilizan GCPs en diferentes ubicaciones:
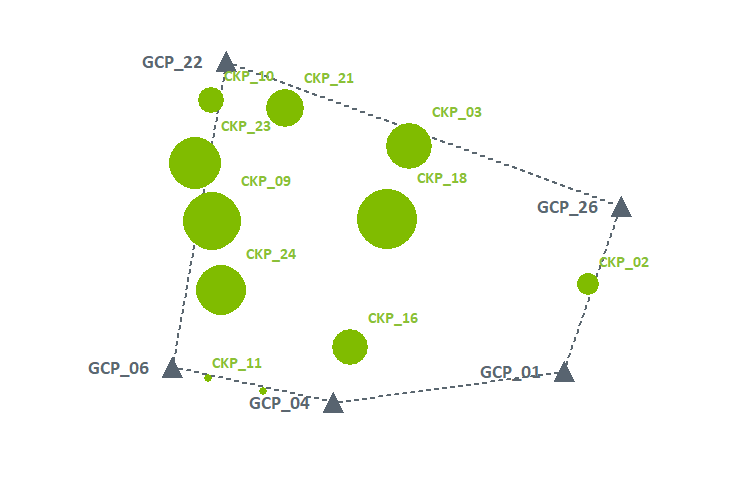
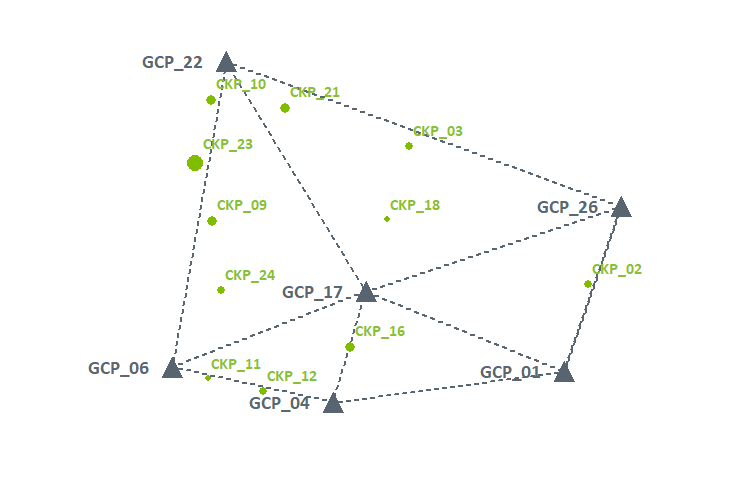
Del gráfico podemos ver que colocando un GCP en el centro
del terreno, la precisión vertical mejora de 65 cms a 6.6 cms. El error se
acumula entre más lejos se esté de un punto de control y alrededor de regiones
complicadas.
Una «región complicada» se refiere a casos que
pudieran ser problemáticos para encontrar emparejamiento de imágenes. Imágenes
tomadas de estas regiones generan más error en las posiciones lo que conlleva
menor precisión. A continuación se presentan, las precisiones de las posiciones
de la cámara para los diferentes casos:
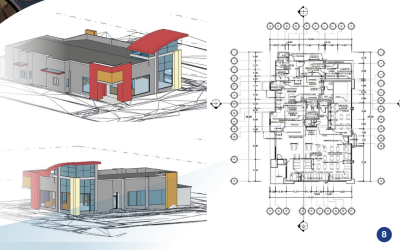
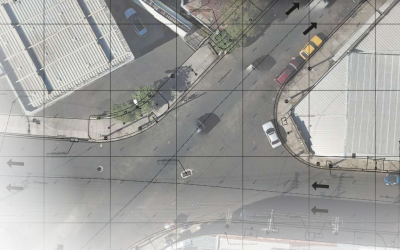
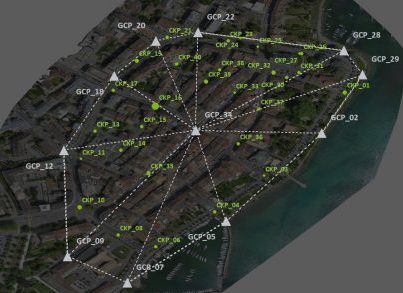
Vuelo urbano
Configuracion: Double grid, altura= 102 m (GSD 2.5 cms), traslape 80%
Volar con dron de ala fija sobre áreas urbanas puede ser complicado. A parte de los permisos requeridos, se necesita un lugar a cielo abierto para realizar el despegue y aterrizaje, lo cual no siempre es fácil de encontrar en áreas urbanas.

En este proyecto, se encontró un parque de deportes cercano al centro de la ciudad. Los edificios, arboles y redes de Wifi locales interfieren en las conexiones de datos durante el vuelo. Se obtuvo solo un 71% de las posiciones de la cámara bien corregidas (fijas).
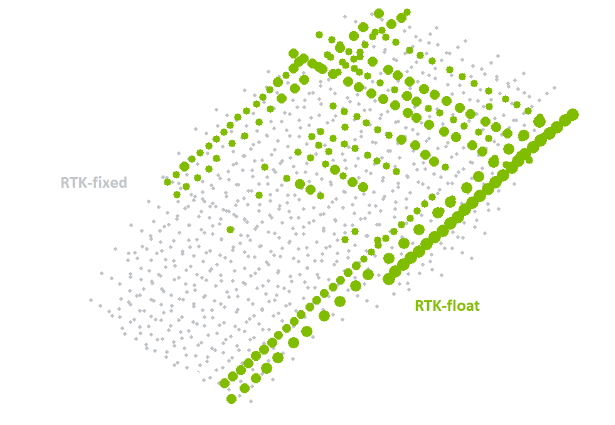
En situaciones reales, la uniformidad de la distribución de las posiciones RTK flotantes (posiciones no determinadas correctamente) causan una limitante para mejorar la precisión global.
De los resultados, se nota la desventaja de los vuelos RTK cuando hay perdidas de conexión debido a los obstáculos. En tales condiciones, correcciones post proceso PPK mejoran el resultados. Aunque no es garantía de ser mejor que cuando se usan GCPs, se obtuvieron resultados bastante parecidos para este caso.

La eleccion de la mejor herramienta de trabajo
Para sembradíos o lugares (planos de preferencia) donde las conexiones de datos son estables y sin obstáculos, los vuelos RTK pueden modelar terrenos muy bien y dar precisiones muy buenas aun sin usar GCPs.
Realizar modelos con un dron RTK es especialmente ventajoso cuando hay mucha vegetación, sembradíos o algún tipo de dificultad para realizar el emparejamiento de imágenes. Siempre se puede mantener gran precisión y calidad, aun cuando se sea capaz de colocar GCPs in situ.

En áreas urbanas, podría haber una diferencia. En ciertas partes se puede perder precisión lo cual ocasiona una distribución no uniforme de posiciones o posiciones RTK flotantes, lo cual, al final, dificulta la mejora de la precisión global del proyecto. En este caso, PPK otorga mejores resultados que los vuelos RTK sin embargo ninguno provee mejores resultados que el post procesamiento con GPCs bien distribuidos.
Ahora ya hemos visto los resultados de ambas soluciones. Sin embargo, hay otros aspectos a tomar en cuenta: la factibilidad, el tiempo, el costo, y a donde se va a realizar el vuelo.
No siempre es factible medir las coordenadas de los GCPs debido a múltiples razones in situ, por ejemplo terrenos pantanosos, áreas imposibles de alcanzar, o cuestiones de seguridad ocupacional y personal. Ademas, la planeacion y medición de GCPs puede llevar varias horas de tiempo, mientras que el post procesado normalmente solo toma entre 10 a 20 minutos. Si de costos hablamos, la medición de los GPCs es un costo que hay que cargar a cada proyecto, contra el costo de la inversión única de un dron con RTK. Considerando a largo plazo, obtener un dron con RTK parece la mejor inversión.
¿Considerando comprar un dron con RTK? No hay que olvidar que hay que tener acceso a estaciones base o VRS en su defecto. Caso contrario habrá que establecerlas por nuestra cuenta.
Este articulo ha sido traducido de «Do RTK/PPK drones give you better results than GCPs?» el cual puede ser consultado directamente en el siguiente enlace